
「学习笔记」图论入门算法
「学习笔记」图论入门算法
本文主要介绍了一些图论的简单入门算法,并附带模板和例题。
主要包括:图论概念,拓扑排序,最短路,双连通分量,强连通分量,最小生成树,拟阵
难度由浅入深,适合 $普及 \sim 提高$ 的选手观看,也欢迎新手来入门,大佬来指导!
$\mathcal{Part \ 1}$:一些概念:
图:一张图 $G$ 由点和边构成,点集为 $V$,边集为 $E$,记 $G=(V,E)$。若无特殊说明,$V = {1,2,\dots,n}$,$|E| = m$。
阶:图的点数 $n$,记作 $|G|$。
有向图与无向图:无向图中 $e \in E$ 没有方向,记作 $e=(u,v)$,为无序对。有向图中 $e \in E$ 有方向,记作 $e = u \to v$ 或有序对 $(u,v)$。
重边与自环:$E$ 中完全相同的两条边称为重边,连接相同点的边称为自环。
相邻:若 $(u,v) \in E$ 则称 $u,v$ 相邻。
邻边 / 出边 / 入边:无向图中与 $u$ 相连的边 $(u,v)$ 称为 $u$ 的邻边;有向图中从 $u$ 出发的边 $u \to v$ 称为 $u$ 的出边,到达 $u$ 的边 $v \to u$ 称为 $u$ 的入边。在之后的描述中,我们认为无向图的出边就是邻边。
途径:连接一串相邻结点的序列称为途径,记为 $v_0 \to v_1 \to \dots \to v_k$,满足 $(v_i, v_{i+1}) \in E$。
迹:不经过重复边的途径。
回路:$v_0 = v_k$ 的迹。
路径:所有点互不相同的途径,也称简单路径。
环:除 $v_0 = v_k$ 外所有点互不相同的途径。
联通:无向图中存在 $v_0 = u, v_k = v$ 的途径则 $u, v$ 联通。
弱联通:有向图改为无向图后 $u, v$ 联通则称 $u, v$ 弱联通。
连通图:任意两点连通的无向图。
弱连通图:任意两点弱连通的有向图。
可达:有向图存在 $v_0 = u, v_k = v$ 的途径,记作 $u \rightsquigarrow v$ 。
简单图:不含重边和自环的图。
有向无环图:不含环的有向图,简称 DAG。
完全图:任意不同的两点之间恰有一条边的无向简单图。
树:不含环的无向连通图。满足 $n = m + 1$ 。若干棵(包括一棵)树组成的连通块称为森林。
稀疏图 / 稠密图:$m$ 远小于 $n^2$ 的图称为稀疏图,$m$ 接近 $n^2$ 的图称为稠密图。
平面图:能画在平面上,满足除顶点处以外无边相交的图。
子图:满足 $V’ \subseteq V, E’ \subseteq E$ 且 $E’$ 两端都在 $V’$ 中的 $G’ = (V’, E’)$ 称为 $G$ 的子图。
导出子图:选择点集 $S$ 以及所有两端都在点集内的边构成的子图,记作 $G[V’]$ 。
生成子图:$|V’| = |V|$ 的子图。
极大子图(分量):满足某性质的极大子图 $G’$,不存在同样满足此性质的子图 $G’’$ 使得 $G’ \subsetneqq G’’ \subseteq G$ 。极大联通子图也就是连通分量,或者连通块。
$\mathcal{Part\ 2}$ :拓扑排序(Topological Sorting)
$\mathcal{Part\ 2.1}$:Kahn
$\text{Problem}$:给定 DAG $G=(V,E)$ ,要求出一个 $1\sim n$ 的排列 $p$, 设 $q_i$ 为 $i$ 在 $p$ 中的位置,满足 $u\to v \in E$,$q_u<q_v$。
题目就是说在访问任意一个点 $u$ 之前,已经访问过 $u$ 的所有入边的点。
我们考虑先访问所有入度为 $0$ 的点(这样的点可以理解为没有访问限制),将这些点插入队列 $Q$,每次取出当前队头 $u$ ,遍历 $u$ 的所有出边,如果连向的点 $v$ 入度为 $1$,由于我们已经访问过 $u$ ,所以 $v$ 的限制以经全部满足,将 $v$ 插入队列,并将 $v$ 的入度 $-1$,反之如果 $v$ 的入度不为 $1$ ,那么只将 $v$ 的入度 $-1$ 即可。
如果最后存在没有被访问的点,证明该图的拓扑序不存在。时间复杂度 $\mathcal{O}(n+m)$。
代码如下:
1 | //使用手写队列实现,便于输出答案,也可选择 STL 中的 queue。 |
$\mathcal{Part \ 2.2}$:例题详解
$\mathcal{A}$:B3644 【模板】拓扑排序
$\mathcal{B}$:P1137 旅行计划
给定一个 $n$ 个点,$m$ 条边的 DAG $G$ ,对于每一个点 $i\in[1,n]$ 求出以结点 $i$ 为终点的,只走一个方向的路径经过结点最多的数量。
思路:我们考虑如何求出结点 $i$ 的答案,注意到 $i$ 的答案取决于 $i$ 所有前驱的答案,发现这满足 拓扑性质。于是我们套用拓扑排序即可。时间复杂度 $\mathcal{O}(n+m)$。
代码:
1 | void Toposort(){ |
$\mathcal{C}$:CF915D
给定一个 $n$ 个点,$m$ 条边的有向图 $G$ ,问是否可以删除一条边使其变成 DAG。
思路:如果我们 暴力枚举 删去的边并判断是否为 DAG,时间复杂度 $\mathcal{O}(m(n + m))$。我们可以换一个角度去考虑,删除一条边实际上是某一个点的入度 $-1$,于是可以枚举哪个点的入度 $-1$,时间复杂度 $\mathcal{O}(n(n + m))$。
1 | namespace Star_F{ |
由于拓扑排序不容易单独出题,于是考虑将一些难题放入 $\mathcal{Part \ 8}$ 图论综合部分。
$\mathcal{Part \ 3}$:最短路(Shortest Path)
$\mathcal{Part\ 3.1}$: 一些定义
带权图:有向图或无向图可以加上边权,边记为 $(u, v, w)$ 。边权值非负的图称为非负权图,边权为正的图称为正权图。
路径长度:带权图中路径上每条边的边权之和。用 $L(v_0 \to v_1 \to \dots \to v_k)$ 表示。
负环:边权和为负数的环。
最短路:最短的连接 $s$ 到 $t$ 的路径。若不存在这样的路径或最小值不存在,则最短路不存在。
$\mathcal{Part\ 3.2}$:单源最短路径问题
$\text{Problem}$:给定一个源点 $S$,求出 $S$ 到图上每个点 $u$ 的最短路径长度 $D_u$。
在下面的算法中,我们定义 $\text{dis}_u$ 表示 $S$ 到 $u$ 的估计最短距离,初始值:$\text{dis}_S =0 ,\text{dis}_u=+\infty(u\in [1,n],u\ne S)$。
算法结束时有 $\text{dis}_u=D_u(u\in[1,n])$。负环均指源点可达负环。
3.2.1:Bellman-Ford
核心思想是进行松弛操作,松弛表示对每条边 $(u, v, w)$,用 $\text{dis}_u + w$ 更新 $\text{dis}_v$,松弛 $n - 1$ 轮。
判断是否存在负环:松弛 $n$ 轮,若第 $n$ 轮还有 $\text{dis}_u$ 被更新,则一定存在负环。
证明:不妨归纳假设 $x$ 轮松弛可以得到所有最短路边数 $\leq x$ 的点的 $D_u$。显然 $x = 0$ 时正确(初始状态,无松弛,最短路边数为 $0$ )。 不妨设 $x = k$ 时正确,考虑最短路边数为 $k + 1$ 的点。设其最短路径为 $s \to p_1 \to \dots \to p_k \to u$,由于 $\text{dis}_{p_k} = D_{p_k}$(归纳假设,$k$ 轮松弛已处理边数 $\leq k$ 的最短路径 ),因此一轮松弛(第 $k + 1$ 轮 )后,$\text{dis}_u$ 会被更新为 $D_u$(通过边 $p_k \to u$ 的松弛操作 )。
若不存在负环,所有点的最短路边数 $\leq n - 1$($n$ 个顶点的图,最长简单路径边数为 $n - 1$ ),故 $n - 1$ 轮松弛后,所有点的最短路径都能被正确计算。
若存在负环,负环会导致路径长度可无限减小(每绕环一次,总长度更短 )。此算法有限轮松弛只能处理“长度有限”的最短路径,而负环会让某些点的最短路径长度无限迭代更新,因此第 $n$ 轮若仍有更新,可判定存在负环。
时间复杂度:$\mathcal{O}(nm)$($n$ 轮松弛,每轮遍历 $m$ 条边 )。
代码如下:
1 | int dis[N][N],n,m; //dis[k][v];表示选取前k个时到达i的最短距离 |
3.2.2:SPFA
SPFA(Shortest Path Faster Algorithm)是队列优化的 Bellman-Ford。
当松弛某个点 $u$ 时,对于所有与 $u$ 相邻且 $\text{dis}_v$ 被更新的点 $v$,若 $v$ 当前不在队列中,则将其压入队列。每次从队列中取出一个点进行松弛操作。
为检测负环,每个点额外记录最短路当前经过的边数 $\text{cnt}_u$;若存在某个点 $u$ 使得 $\text{cnt}_u \geq n$,则判定图中存在负环。
实际上其松弛过程与 Bellman-Ford 类似,可感性理解为:队列中始终维护了 ”可能通过进一步松弛缩短路径” 的点集。每次取出队首点松弛其邻接边,相当于 Bellman-Ford 中 “按需” 进行的局部松弛,避免了对所有边进行冗余检查。
时间复杂度:最坏仍为 $\mathcal{O}(nm)$。在一般随机图上效率常优于 Bellman-Ford,但有特殊数据可以卡,需要慎重使用!
代码如下:
1 | void SPFA(){ |
3.2.3:Dijkstra
Dijkstra 算法只适用于非负权图。
称 扩展 节点 $u$ 表示对 $u$ 所有的出边 $(u, v, w)$ 用 $\text{dis}_u + w$ 更新 $\text{dis}_v$。每次选择 $\text{dis}$ 最小的 未扩展过 的 $u$,对 $u$ 进行扩展。
证明:只需要证明每次扩展的 $u$ 满足 $\text{dis}_u = D_u$。不妨归纳假设已经扩展过的点 $p_1, …, p_{k-1}$ 满足 $\text{dis}_u = D_u$,考虑下一个扩展的 $p_k$ 一定也得到最短路。否则也就意味着存在更短的路径 $s \rightsquigarrow p_i \rightarrow u_1 \rightsquigarrow p_k$,其中 $u_1$ 是没有被扩展的点,则此时 $\text{dis}_{u_1} < \text{dis}_{p_k}$,与 $p_k$ 的选择矛盾。因此归纳成立。
稀疏图实现时使用优先队列,扩展时如果有更新,则把 $(v, \text{dis}_v)$ 加入优先队列。每次从优先队列中取出最小的没有被扩展过的进行扩展。注意判断 $(v, d)$ 中的 $d$ 是否等于 $\text{dis}_v$,若不等则已经被扩展过。时间复杂度 $O(m \log m)$。
稠密图每次暴力找最小值,时间复杂度 $O(n^2)$。
当边权只有 0 和 1 时,使用双端队列代替优先队列。称为 01 BFS。时间复杂度 $O(n + m)$。
代码如下:
1 | // 优先队列版本 |
3.2.4:总结
根据题目给出的数据范围,选择适合的算法。(如存在负环则不能使用 Dijkstra,稠密图和稀疏图等)。
$\mathcal{Part\ 3.3}$:全源最短路径问题
$\text{Problem}$:求出任意两点之间的最短距离 $D_{s,t}$。
3.3.1:Johnson
新建一个超级源点 $0$,从超级源点 0 向所有点连边,跑 BF/SPFA 得到最短路 $h_u$。将边 $(u, v, w)$ 改为 $(u, v, w + h_u - h_v)$,在新图上以 $s$ 源点跑 Dijkstra,则 $D_{s,t} = D_t + h_t - h_s$。
证明:考虑对边进行操作后,原图和新图上路径长度
只相差一个只与起点终点有关的数,因此原图的最短路在新图上也是最短路。再考虑 $h$ 是最短路,因此 $h_v \leq h_u + w$,也就是新图是非负权图,可以使用 Dijkstra。
时间复杂度 $O(nm \log m)$。
代码如下:
1 | namespace Star_F { |
3.3.2:Floyd(传递闭包)
初始化所有 $\text{dis}_{u,u} = 0, (u, v, w) \in E, \text{dis}_{u,v} \leftarrow w$。枚举中转点 $k$,起点 $i$,终点 $j$,用 $\text{dis}_{i,k} + \text{dis}_{k,j}$ 更新 $\text{dis}_{i,j}$。注意中转点必须在最外层枚举。
考虑这样一个算法,$\text{dis}_{k,s,t}$ 表示 $s \leftrightarrow t$ 只经过编号 $\leq k$ 的最短路(不包括起点终点),转移即为加入 $k+1$,也就是 $\text{dis}_{k+1,s,t} = \min(\text{dis}_{k,s,t}, \text{dis}_{k,s,k+1} + \text{dis}_{k,k+1,t})$。
事实上省略第一维导致的重复转移并不会影响答案,即得到正常写的 Floyd 算法。
时间复杂度 $O(n^3)$。
此外 Floyd 计算闭包,也就是两点可达性可以做到 $O\left(\frac{n^3}{\omega}\right)$。$\omega$ 为 bitset 提供的 $\frac{1}{64}$ 常数优化。
代码如下:
1 | for (k = 1; k <= n; k++) |
3.3.3:总结
还是要根据不同的数据来使用不同的算法,Floyd 优势在于代码简洁,如果图为稠密图,即 $m\approx n^2$ 时,选择 Floyd 算法更优。
$\mathcal{Part\ 3.4}$:扩展问题
3.4.1:最短路树(SPT)
我们希望用一个树形结构去刻画 $s$ 到每个点的最短路。在单源最短路径中,记录每个点最后被更新的前驱 $f_i$,即可得到图的最短路树。
不难发现一定满足 $\text{dis}_{f_i} + w(f_i, i) = \text{dis}_i$,并且一定不会存在环,也就是从 $s$ 出发沿树上走简单路径得到的就是最短路。
类似也能得到到达 $s$ 的最短路树。
扩展:在不含零环的图上保留 $\text{dis}_u + w = \text{dis}_v$ 的边,得到有向无环图(若有环则必然是零环)称为最短路 DAG。此 DAG 任意路径都是最短路,任意最短路在 DAG 上,任意生成树都是最短路树。
无向正权联通图,求从 $u$ 出发权值和最小的最短路树。
我们定义 $\text{pre}_i$ 表示最短路树上点 $i$ 的前驱,由于建的图是双向边,所以输出 $\lceil \frac{\text{pre}_i}{2} \rceil$ 即可。
代码如下:
1 | namespace Star_F{ |
3.4.2:删边最短路
$\text{Problem}$:给定正权无向图,求删除每一条边后 1 到 n 的最短路。
定义从 1 出发的最短路树为 $T_1$,达到 $n$ 的最短路树为 $T_n$。我们用 $T(y)$ 表示树 $T$ 上到 $y$ 的路径。
对于边 $(i, j)$ 若不在原最短路上则最短路不变,否则不妨设原最短路是 $1 \rightsquigarrow i \to j \rightsquigarrow n$,找到边 $(u, v, w)$ 使得 $u$ 不在 $T_1$ 中 $j$ 的子树内,$v$ 不在 $T_n$ 中 $i$ 的子树内。也就是只经过一条非树边。
具体实现时枚举非树边 $(u, v, w)$,找到 $u’ = \text{LCA}_{T_1}(u, n), v’ = \text{LCA}_{T_n}(v, 1)$,对于最短路 $(u’, v’)$ 之间的边用 $L(T_1(u)) + w + L(T_n(v))$ 更新答案。使用线段树等数据结构可做到 $O(m \log m)$。
证明:以下的证明中认为 $T_1$ 中到 $n$ 的路径和 $T_n$ 中到 $1$ 的路径相同。
不妨设 $T_1$ 上 $j$ 的子树为 $A_j$,子树外为 $A_i$,$T_n$ 上 $i$ 的子树为 $B_i$,子树外为 $B_j$。
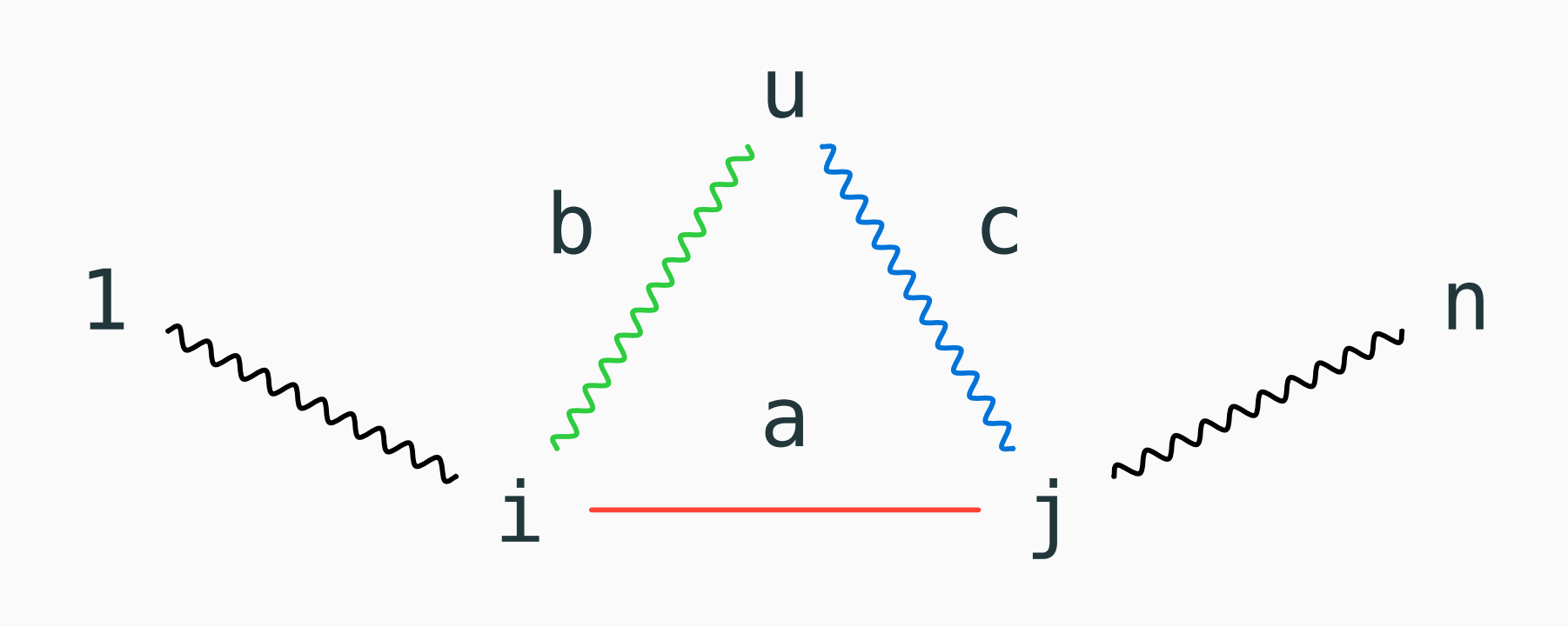
先证明 $A_j \cap B_i = \emptyset$,考虑若 $u \in A_j \cap B_i$,考虑下图
其中 $a$ 为 $i \leftrightarrow j$ 边权,$c$ 为 $j \rightsquigarrow u$ 的最短路,$b$ 为 $i \rightsquigarrow u$ 的最短路,由于 $u \in A_j$,因此 $L(1 \rightsquigarrow i) + a + c \leq L(1 \rightsquigarrow i) + b$,即 $a + c \leq b$,同理 $a + b \leq c$,两式相加得到 $a \leq 0$ 矛盾。
于是考虑删边后的最短路 $P’$,由于 $1 \in A_i, n \in A_j$,找到第一条 $(u, v, w)$ 满足 $u \in A_i, v \in A_j$,把 $1 \rightsquigarrow u$ 换成 $T_1(u)$,不会经过 $(i, j)$,由于是最短路显然不劣,再由于之前的证明 $v \notin B_i$ 即 $v \in B_j$,同理可以替换成 $T_n(v)$,这样就得到只相差一条非树边的最短路。
3.4.3:平面图最小割
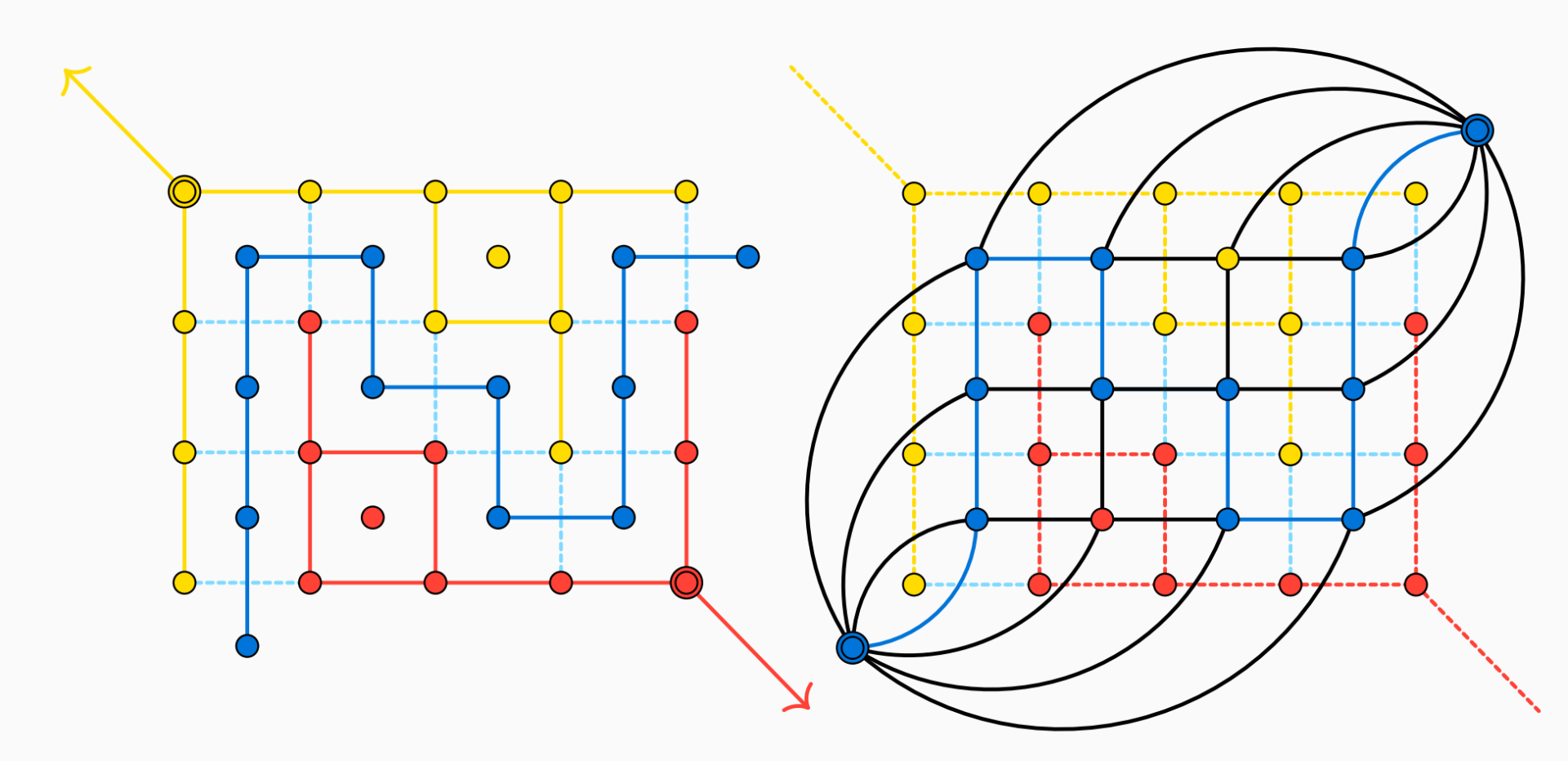
我们先考虑网格图的最小割,事实上和一般平面图没有本质区别。
网格图从左上角 $s$ 到右下角 $t$ 的最小割,找到一种划分点集的方式 $V = S \cup T$ 满足 $s \in S, t \in T$ 且两端分别在 $S$ 和 $T$ 的边(即割边)权值之和最小。
考虑起点和终点把图外的平面分为两部分。我们把所有面建一个点,原来的边在边两边的平面对应的点连边,得到平面图的对偶图。
显然对偶图的最短路可以对应到一个合法的割。同样对于一个合法的割,对偶图中必然存在一条从左下到右上的路径。
也就是 平面图最小割等于对偶图最短路。
例:P4001 [ICPC-Beijing 200] 狼抓兔子
$\mathcal{Part\ 3.5}$:例题详解
$\mathcal{A}$:P1144 最短路计数
求出从顶点 $1$ 开始到每个点的最短路径的方案数。
思路:其实就是板子题,在每次更新最短路的时候,顺便记录一下方案数就可以。另外由于本题的边权都是 $1$,所以无需使用堆优化,使用普通的队列即可。
代码如下:
1 | queue<int> Q; |
$\mathcal{B}$:P1462 通往奥格瑞玛的道路
$n$ 个点,$m$ 条边的无向图,边有边权,点有点权,求出一条 $1$ 到 $n$ 的路径,使得 边权之和 小于给定限制 $b$,并且最小化经过点权的最大值。$1 \le n\le10^4,1\le m \le 5\times10^4$。
思路:看到求最大值最小,我们考虑二分答案。二分一个最大点权 $\text{mid}$,如果我们可以找到一条 只走点权 $\le \text{mid}$ 的点,并且边权和 $\le b$ 的一条路径 那么我们,那么我们更新 $l$ ,否则更新 $r$。时间复杂度 $\mathcal{O}(m\log m\log \max_{i=1}^{f_i})$。可以通过。
代码如下:
1 | namespace Star_F{ |
$\mathcal{C}$:P4568 [JLOI2011] 飞行路线
给定一个 $n$ 个点,$m$ 条边的无向图,有边权,其中可以将 $k$ 条边的边权变为 $0$ ,求 $s\to t$ 的最短路径。
思路:分层图模板题目。
我们考虑给每一层的内部正常连边,每层之间从上到下连权值为 $0$ 的边。如果我们这样建图的话,相当于每向下走一层,就相当于使用一次边权变为 $0$,所以我们求 $s$ 到 $t+n\times k$ 的最短路即可。(多加了 $k$ 层,每层 $n$ 个结点,所以是 $t+n\times k$ )。
但是我们发现,其实可以不把分层图真的建出来,而是在求最短路的时候,使用动态规划的思想更新答案。
具体来讲,我们定义 $dis_{i,j}$ 表示从 $s$ 到 $i$ ,使用了 $j$ 次边权变为 $0$ 的最短路径长度。
对于一条边 $(u,v,w)$ 转移如下:
时间复杂度:$\mathcal{O}(k\times m\log m)$。
代码如下:
1 | void Dijkstra(){ |
$\mathcal{Part \ 4}$:双连通分量
$\mathcal{Part\ 4.1}$:一些定义
- 割点:删去后使连通分量增加的点。
割边:删去后使连通分量增加的边,也称桥。
点双连通图:不存在割点的无向连通图。
边双连通图:不存在割边的无向连通图。
点双连通分量:极大点双连通子图,简称点双(V-BCC)。
边双连通分量:极大边双连通子图,简称边双(E-BCC)。
点双连通:$u, v$ 处于同一个点双。
- 边双连通:$u, v$ 处于同一个边双。
$\mathcal{Part\ 4.2}$:无向图 DFS 树
给定无向连通图 $G$,从 $r$ 开始 DFS,取出进入每个点 $i$ 时对应的边 $(\text{fa}_i, i)$ 得到以 $r$ 为根的叶向树。称 $(\text{fa}_i, i)$ 为树边,其余边为非树边。
每个点标号为被访问到的次序称为时间戳,简称 $\text{dfn}$。
最重要的性质是非树边两端具有 祖先后代关系。
$\mathcal{Part\ 4.3}$:双连通的简单性质
4.3.1:边双连通
直观理解边双:每断开一条割边,连通块个数都会加一。如果断开所有割边,会得到割边条数 $+1$ 个联通分量,每个联通分量都是边双。如果把同一个边双内的点进行缩点,得到一棵树。
下面的结论是显然的:
称从 $u$ 到 $v$ 必须经过的边为必经边,那么:
两点之间任意一条迹上的所有割边,就是两点之间的所有必经边。
$a$ 和 $b$ 边双连通,$b$ 和 $c$ 边双连通,则 $a$ 和 $c$ 边双连通。
$u, v$ 边双连通当且仅当 $u, v$ 之间没有必经边。
对于一条边 $(u, v)$,删去后找到路径 $u \rightsquigarrow v$,拼起来就是回路。
边双内任意一条边 $(u, v)$ 存在经过此边的回路。
边双内任意一点 $u$ 存在经过此点的回路。
边双内任意两点 $u, v$,存在经过两点的回路。
4.3.2:点双联通
直观理解点双:两个点双最多只有一个交点,不然就会变成一个。若 $S_1$ 与 $S_2$、$S_2$ 与 $S_3$ 有交,$S_3$ 与 $S_1$ 有交,那么交点一定是同一个。于是所有点双会形成类似树形的结构。
下面的结论是显然的:
若两点双有交,那么交点一定是割点。
一个点是割点当且仅当它属于超过一个点双。
一条边直接连接的两点点双连通。
一条边恰属于一个点双。
对于 $n \geq 3$ 的点双,对于点 $x$,度数必然 $\geq 2$,删去后找到相邻的 $u, v$,找到一条 $u, v$ 的路径拼起来。
$n \geq 3$ 的点双内任意一点 $u$ 存在经过此点的简单环。
点双内任意两点 $u, v$,存在经过这两点的简单环。
我们也可以得到更多的推论:
- $n \geq 3$ 的点双内对于点 $x$ 和边 $e$,存在经过 $x$ 和 $e$ 的简单环。
证明:把 $e = (u, v)$ 拆成 $(u, w), (w, v)$,显然不影响点双连通性,找经过 $x, w$ 的简单环即可。
- $n \geq 3$ 的点双内对于点 $x \neq y$ 和边 $e$ 存在 $x \rightsquigarrow e \rightsquigarrow y$ 的简单路径。
证明:找经过 $x, e$ 的简单环 $C$,若 $y \in C$ 则成立。否则找到任意 $y \rightsquigarrow x$ 的路径 $P$,找到第一个 $C$ 上的点 $z$,必然存在 $z \neq x$ 的 $P$,拼接环 $C$ 的部分和 $z \rightsquigarrow y$ 的部分即可。
- $n \geq 3$ 的点双任意不同三点 $x, y, z$ 存在 $x \rightsquigarrow y \rightsquigarrow z$ 的路径。
$\mathcal{Part\ 4.4}$:点双
$\mathcal{Part\ 4.5}$:边双
$\mathcal{Part\ 4.6}$:圆方树
$\mathcal{Part \ 5}$:强连通分量
$\mathcal{Part\ 5.1}$:一些定义
$\mathcal{Part\ 5.2}$:有向图 DFS 树
$\mathcal{Part\ 5.3}$:SCC
$\mathcal{Part \ 6}$:最小生成树
$\mathcal{Part\ 6.1}$:一些定义
$\mathcal{Part\ 6.2}$:最小生成树求法
$\mathcal{Part\ 6.3}$:Kruskal 重构树
$\mathcal{Part \ 7}$:拟阵
$\mathcal{Part\ 7.1}$:引入
$\mathcal{Part\ 7.2}$:拟阵上的最优化
$\mathcal{Part\ 7.3}$:拟阵交
$\mathcal{Part \ 8}$:图论综合
到此为止,图论相关入门算法已全部介绍完毕。
欢迎反馈错误,欢迎私信交流。